Primer
Log entry = (Term, Index, Command)
in RDBMS, Log=WAL/redo log, FSM=records
Components
- FSM
- LogStore
- LastIndex
- FirstIndex
- StableStore
- CurrentTerm
- LastVoteTerm
- LastVoteCand
- SnapshotStore
- PeerStore
RPC Protocol
msgpack serializer
- AppendEntries
Leader发起
If got reponse with Success=false,then step down(退位)- Term
Each term begins with an election - Leader
partition后,old leader在复制日志时,通过它发现new leader,并step down - PrevLogIndex, PrevLogTerm
它们确保在相同term/index上的log内容完全一致, 而且之前的所有log内容一致:safety - LeaderCommitIndex
只有committed log才能被FSM Apply - []Log
- Term, Index
- Type
- LogCommand
复制日志 - LogAddPeer
- LogRemovePeer
- LogNoop
- LogBarrier
- LogCommand
- Term
- RequestVote
Candidate发起,if not Granted,step down to follower
leader/candidate也可能收到RequestVote
发起投票时,可能会收到AppendEntries,比较term来决定进入follower状态还是拒绝- Term
- LastLogIndex, LogLogTerm
选民如果发现candidate的log没有自己的新,则拒绝投票
阻止一个不包含所有committed entries的candidate成为leader
- InstallSnapshot
Leader发起
2PC
Leader’s log is ‘the truth’
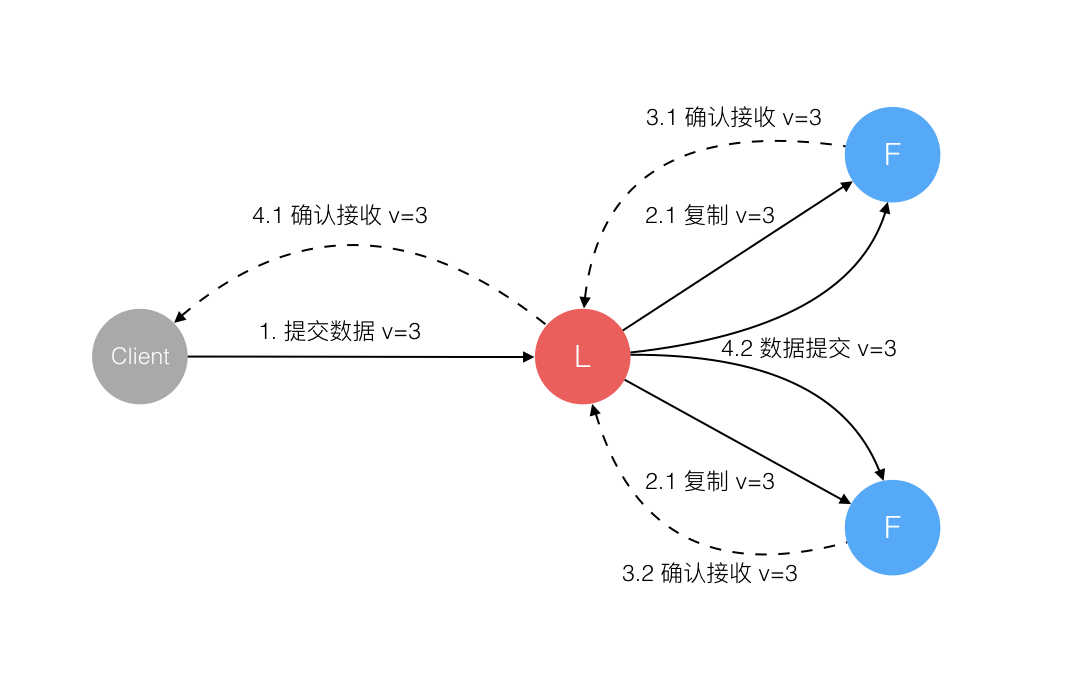
2.1是第一次AppendEntries,3.1后Leader apply to local FSM并update commit index,就可以向client返回了
4.2是下一次AppendEntries,leader通知followers最新的commit index,followers才会apply to FSM
When the Commit Index is updated, the node will pass all commands between the new and old Commit Index to the state machine.
phase2的作用:
uncommitted log是可能回滚的
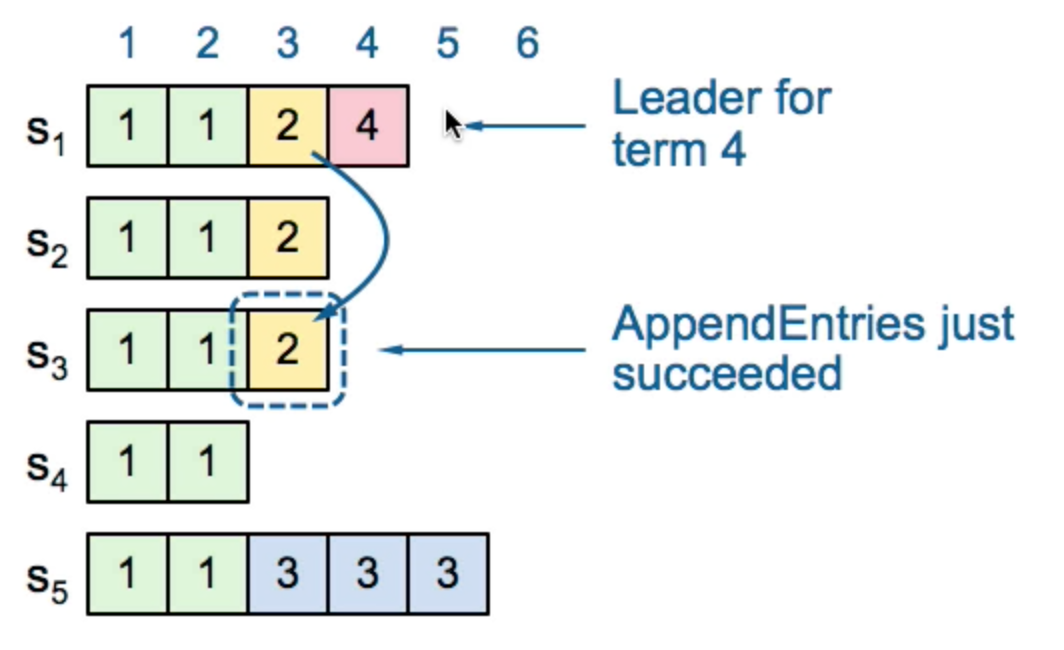
Commit
For a leader to decide an entry is committed
- must be stored on majority
- at least one new entry from current term must also be stored on majority
Election
leader要给peers发心跳,阻止新选举(如果一直没有Apply,多久发心跳?)
处理RequestVote RPC
Replication
leader保存每个followerReplication状态
|
|
Repair follower logs
- delete extraneous entries
- fill in missing entries
startup
|
|
runFSM
|
|
runLeader
|
|
appendEntries RPC
|
|
runCandidate
|
|
Configuration Change
采用2PC方法: C_old -> C_old+new -> C_new
http://zookeeper.apache.org/doc/trunk/zookeeperReconfig.html
zookeeper 3.5.0开始,也有了动态修改cluster的功能
Q & A
time
|
|
为什么每个node上的current term需要持久化?
It is best guess, persistent for recovery after crash.
恢复时,从leader拿不行吗?
为什么每个node上的votedFor要持久化?
为了保证election safety: allow at most one winner per term
term1,A vote for B,然后A crash,等A恢复了,如果voteFor不持久化,可能它对term1又vote for C了
成为leader后,立刻发heartbeat还是等heartbeat timeout?
如果一个follower的AppendEntries失败,leader怎么处理?
一直retry,Leader’s log is ‘the truth’.
Log是幂等的,因为有term/index,可以很容易排重
但在client方面,就没有保障了:
如果leader crash after executing command but before responding?
client如果盲目retry,有可能造成重复执行
解决办法:client在发送log时,在每个命令上加入id,确保幂等
leader上保存每个follower的index
Engineering
Config
HeartbeatTimeout = ElectionTimeout = 1s
LeaderLeaseTimeout = 500ms
CommitTimeout = 50ms
MaxAppendEntries = 64
SnapshotInterval = 2m
SnapshotThreshold = 8192
Group Commit
0 < MaxAppendEntries <= 1024
|
|
Lease
除了follower通过被动接受心跳来检测leader存活,leader本身也通过与majority follower
的response来判断自己是否已经被partition了,如果是,进入Follower状态
Pipeline
仅仅用于AppendEntries,通过channel实现多次发送RPC给follower而不等待response
但如果有错误响应,立刻取消pipeline模式
max outstanding AppendEntries RPC calls = 128
Limitations
Apply([]Log)
只能在leader上发起,follower没有自动redispatch
applyCh是no buffer的StableStore.GetUint64
如果没有找到key,返回的error必须是”not found”LeaderCh() might lose event
Paxos
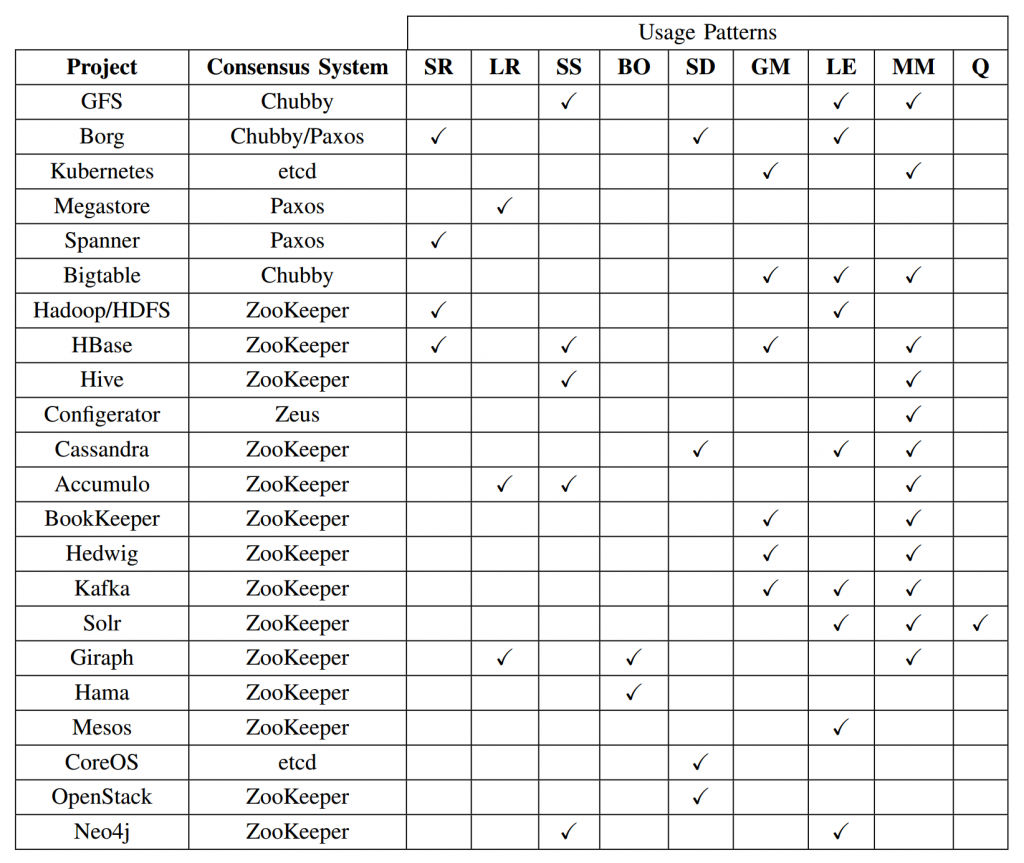
server replication (SR), log replication (LR), synchronisation service (SS), barrier orchestration (BO), service discovery (SD), leader election (LE), metadata management (MM), and Message Queues (Q).
CAP
证明:
在一个network partition的2个节点,现在有两个client分别向他们发送冲突的请求,如果要C,那么必然有一个节点要拒绝:牺牲A;如果要A,必然牺牲C
References
1985 FLP Impossibility Result
1988 Oki and Liskov’s Viewstamped Repication
1998 Lamport’s original Paxos paper “Part-Time Parliment”
2000 Brewer proposes CAP conjecture during Keynote at PODC
2002 Proof of CAP by Gilbert and Lynch(CAP 2年后才被正式证明)
2005 Lamport’s Technical Report on Generalized Consensus & Paxos
2013 Raft Consensus Paper first available online
http://www.cnblogs.com/foxmailed/p/3418143.html
http://raftuserstudy.s3-website-us-west-1.amazonaws.com/study/raft.pptx
http://www.read.seas.harvard.edu/~kohler/class/08w-dsi/chandra07paxos.pdf
https://www.cse.buffalo.edu//~demirbas/publications/cloudConsensus.pdf
http://www.cl.cam.ac.uk/techreports/UCAM-CL-TR-857.pdf